LifeX - The Life eXpectancy predictor¶
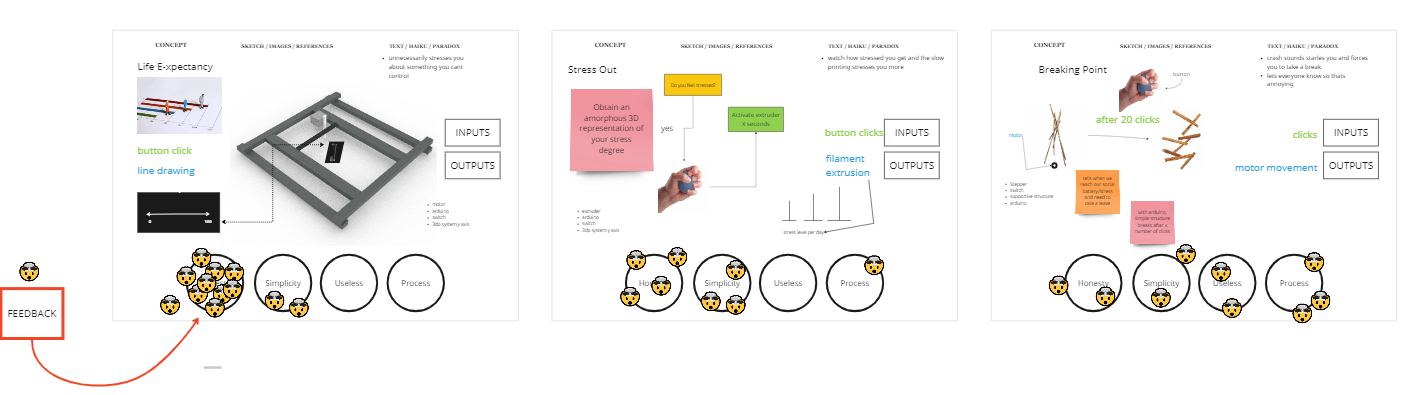
After brainstorming and presenting three proposals, we decided to build the LifeX, a modern version of glass balls. It’s a pretty useless machine that draws a line on a bookmark whose distance represents the life expectancy of the person who pressed the button to activate it.
Work in progress¶
Life X Code
//Servomotor library
#include <Servo.h>
// Define stepper motor connections and steps per revolution:
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
//LCD settings
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
//PEN ServoMotor
Servo penMotor; //define the servomotor
int potpin = A1; //define servomotor pin
int val; //variable for servomotor
const int buttonPin = 4; // the number of the pushbutton pin
int buttonState = 0; // variable for reading the pushbutton status
const int buttonPin1 = 5;
int buttonState1 = 0;
int home = 0;
int prediction = 0;
int start = 0;
long ranValue;
void penUp(){
//PEN UP
delay(1000);
val = 0;
val = map(val, 0, 1023, 0, 180);
penMotor.write(val);
}
void penDown(){
//PEN DOWN
val = 90;
penMotor.write(val);
}
void setup() {
Serial.begin(9600);
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(buttonPin, INPUT);
penMotor.attach(potpin);
randomSeed(analogRead(0));
lcd.begin();
lcd.backlight();
}
void initit() {
if ((buttonState == HIGH) && (home == 0)) {
digitalWrite(dirPin, HIGH);
Serial.println("Reset...");
void penUp();
prediction = 0;
//Spin the stepper motor 5 revolutions fast:
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
} else if (buttonState == LOW) {
//Serial.println("Ready!");
home = 1;
}
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
buttonState1 = digitalRead(buttonPin1);
initit();
if ((buttonState1 == LOW) && (home == 1)) {
ranValue = random(0,23); // 1000*20200
ranValue = ranValue * 100;
lcd.clear();
lcd.setCursor(2,0);
Serial.println("Predicting...");
lcd.print("Predicting...");
if (prediction == 0) {
digitalWrite(dirPin, LOW);
void penDown();
for (int i = 0; i < ranValue; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
prediction = 1;
}
//the prediction is done!
lcd.clear();
Serial.print("Your Lifex is: ");
Serial.println(ranValue/23);
lcd.setCursor(1,0);
lcd.print("Your Lifex is: ");
lcd.setCursor(7,1);
lcd.print((ranValue/23)+10);
//get back Home
void penUp();
delay(5000);
home = 0;
//initit();
}
}
}
Final result¶
Presentation¶
Video
Slideshow